

A laser heater is a short undulator that is positioned in the FLASH linac in order to suppress microbunching that may degrade the seeding process. It “heats up” the bunch with an external laser and induces an uncorrelated energy spread to suppress the microbunching instabilities. The undulator has a planar hybrid magnet structure with 43mm period length, 11 full periods, 22mm minimum gap and a deflection parameter K of 1.52 (K = (eBλu) / (2π mec), with B - max. magnetic field amplitude, λu - period length) to match the 534 nm laser wavelength at 146 MeV beam energy. The FLASH laser heater undulator (LHU) will be located upstream of the first bunch compressor chicane (FL0CBC1).
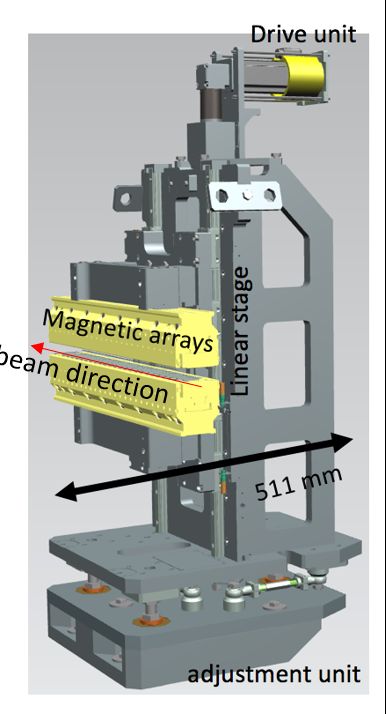
One of the main challenges involved in designing the unit was to make it compact to fit in the installation space of max. 566 mm in beam direction. The magnetic arrays including the end poles and the magic fingers have to be accommodated within this space. The figure on the right shows a 3D model of the Laser Heater undulator.
The overall height of 700 mm is determined by the size of the linear drivetrain for opening and closing the magnetic gap, and by the necessary space for measurement tools for magnetic tuning. The minimum working gap of 22 mm is defined by the aperture required for the electron beam in order to keep losses on a tolerable level. Considering the overall height, this allows for a gap range from 22mm to 220 mm. For compactness, the gearbox and motor at the top end are placed in a 90°-tilted configuration. An adjustment base is placed underneath the actual gap mechanics. This allows for vertical and horizontal adjustment for the final alignment of the undulator with respect to the beam axis.
The main component of the control system is a compact synchronous servomotor equipped with an 18 bit multiturn absolute rotary encoder and built-in holding brakes. The EtherCAT box used as a servo drive for the motor helps to set the motor parameters directly in the TwinCAT system and simplifies the configuration. The control system is based on a software-NC (Numerical control) and -PLC (Programmable logic controller) running on a compact PC with a Windows 10 IoT operating system. It handles the positioning of the girders and safety-features like limit-switches. The control system provides a user-interface for commissioning as well as an interface to the global FLASH control system. Using TwinCAT 3 as the development environment for the laser heater undulator will serve as a test case for future devices at FLASH2020+ and will help with replacing outdated software components based on TwinCAT 2.
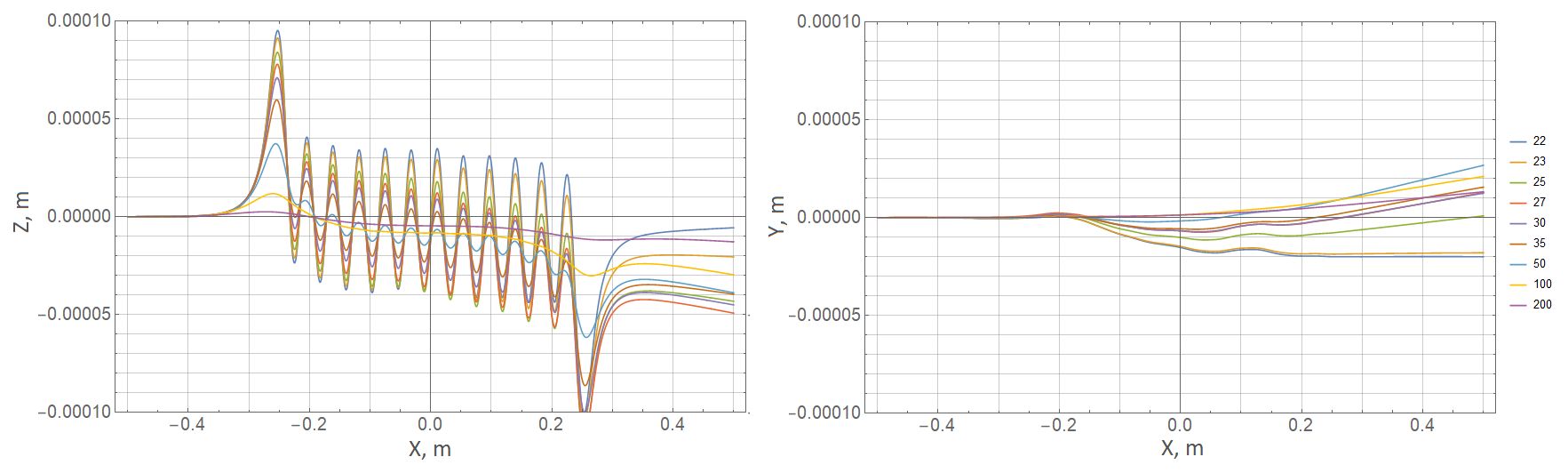
The undulator has a hybrid magnetic structure with a period length of 43mm which matches the spectral requirements for the specified minimum gap of 22 mm. The LHU is designed for a laser wavelength of 534 nm with the possibility of tuning the wavelength by at least 5% for commissioning purposes. The cross- section of poles and magnets has been adapted from the FLASH2 undulators which allowed for a simple mechanical adaption of the compact magnet structure. Sm2Co17 magnet material was selected for its increased radiation hardness; poles are from VACOFLUX 50. Field maps, to calculate the trajectory and dynamic multipoles, were measured using 3D Hall probe bench. An example for the trajectories is shown on the right.
Contact: A. Schöps, P. Neumann, P. Vagin, M. Tischer
Publications and further literature:
S Telawane, A Schöps, P Neumann, T Ramm, M Tischer and P Vagin: J. Phys.: Conf. Ser. 2380 012028 (2022)
Gerth C., Allaria E., Choudhuri A., Schaper L., Schneidmiller E., Schreiber S., Tischer M., Vagin P., Vogt M., Winkelmann L. and Yurkov M.V., Proceedings of the 12th International Particle Accelerator Conference, Campinas, Brazil (2021).

Loading menu, please wait..
Deutsches Elektronen-Synchrotron DESY
A Research Centre of the Helmholtz Association
✖
Loading menu, please wait..
Loading menu, please wait..
Laser Heater
Data Privacy Policy |
Declaration of Accessibility |
Imprint
© 2026 Deutsches Elektronen-Synchrotron DESY